

24小時全國服務熱線:18902855590

24小時全國服務熱線:18902855590
隨著智能家居市場的蓬勃發展,掃地機器人憑借其便捷性與高效性,逐漸成為現代家庭清潔的得力助手。本方案旨在利用輝芒微 32 位 MCU 為核心控制單元,開發一款功能強大、性能穩定且成本可控的智能清潔機器人,為用戶提供更優質的家居清潔體驗。
輝芒微 32 位 MCU 具備卓越的處理能力、豐富的外設接口以及低功耗特性,能夠滿足掃地機器人在路徑規劃、傳感器數據采集、電機驅動控制等多方面的需求。通過精心設計的硬件電路與軟件算法,實現機器人自主導航、智能避障、高效清掃以及自動充電等功能,使產品在激烈的市場競爭中脫穎而出。
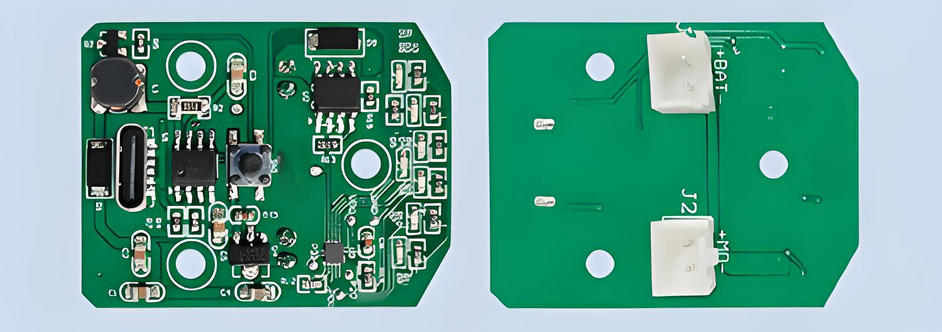
深圳三佛科技推出的掃地機器人方案,主控芯片使用輝芒微MCU單片機,MCU實現的功能如下:
采用多傳感器融合技術,包括激光雷達、紅外傳感器、超聲波傳感器以及陀螺儀等。激光雷達能夠快速掃描周圍環境,獲取高精度的距離信息,構建環境地圖;紅外傳感器和超聲波傳感器用于近距離障礙物檢測,輔助激光雷達進行更精準的定位;陀螺儀則實時監測機器人的姿態變化,確保導航精度。
基于 SLAM(Simultaneous Localization and Mapping,即時定位與地圖構建)算法,結合 A* 算法進行路徑規劃。SLAM 算法通過傳感器數據實時構建環境地圖,并確定機器人在地圖中的位置;A* 算法則根據地圖信息,為機器人規劃出一條從當前位置到目標位置的最優清掃路徑,同時考慮避開障礙物、減少重復清掃區域等因素。

在機器人四周均勻布置多個紅外傳感器和超聲波傳感器,形成全方位的避障檢測網絡。紅外傳感器主要用于近距離障礙物檢測,當物體距離較近時,能夠快速響應并觸發避障動作;超聲波傳感器則負責中遠距離障礙物檢測,提前感知障礙物位置,使機器人有足夠的時間進行避障決策。
針對機器人可能遇到的困境,如陷入地毯、卡在家具縫隙等,設計了智能脫困策略。通過在機器人底部安裝壓力傳感器和電機電流檢測模塊,實時監測機器人在行駛過程中的壓力變化和電機負載情況。當檢測到壓力異常升高或電機電流過大時,判斷機器人可能陷入困境。
此時,MCU 觸發脫困程序,控制機器人按照預設的脫困動作進行操作,如先嘗試后退一定距離,然后左右擺動或旋轉一定角度,再次嘗試前進脫困。若多次嘗試仍未成功脫困,機器人將自動停止并發出警報通知用戶,同時將自身位置信息發送至用戶的手機 APP,方便用戶及時處理。
設計了多種清掃模式,包括普通清掃模式、邊緣清掃模式、重點清掃模式和深度清掃模式。普通清掃模式適用于大面積房間的日常清掃,機器人按照規劃路徑均勻清掃;邊緣清掃模式專門針對房間角落、墻邊等邊緣區域,機器人會沿著邊緣緩慢行駛,確保邊緣區域的灰塵和雜物被徹底清掃干凈;重點清掃模式則允許用戶通過手機 APP 指定特定區域進行重點清掃,機器人會集中力量對該區域進行多次清掃,提高清潔效果;深度清掃模式采用更高的吸力和更慢的清掃速度,適用于頑固污漬或長時間未清掃的區域。
在機器人內部安裝灰塵傳感器,實時監測清掃過程中灰塵的吸入量。MCU 根據灰塵傳感器的數據,判斷當前區域的清潔程度。如果某一區域灰塵量較多,機器人會自動增加清掃時間和吸力,確保該區域達到理想的清潔效果;若灰塵量較少,則適當加快清掃速度,提高整體清掃效率。
清掃完成后,機器人將清潔效果數據上傳至用戶的手機 APP,用戶可以直觀地了解本次清掃的詳細情況,包括清掃時間、清掃面積、灰塵量等信息,便于用戶對清潔效果進行評估和后續的清潔計劃安排。
采用電磁感應式充電技術,充電座發出特定頻率的電磁信號,機器人通過內置的電磁感應模塊接收信號,利用輝芒微 32 位 MCU 的信號處理能力,對電磁信號進行解碼和定位計算,確定充電座的位置。即使在較遠距離或復雜環境下,機器人也能夠快速、準確地找到充電座。
在接近充電座時,機器人會進一步降低速度,通過微調行駛方向,使充電接口與充電座精準對接。MCU 控制電機的微調動作,確保對接的準確性,避免因對接失敗導致充電中斷。
MCU 實時監測機器人電池的電量狀態,當電量低于設定的閾值時,自動啟動低電量返回充電程序。機器人會立即停止清掃工作,按照預先規劃的返回路徑或利用實時定位技術,快速返回充電座進行充電。
在返回充電過程中,如果遇到障礙物或路徑變化,機器人能夠自動調整路線,確保順利返回充電座。同時,機器人會向用戶發送低電量提醒信息,告知用戶機器人正在返回充電,讓用戶對機器人的狀態有清晰的了解。
在機器人頂部設計一個簡潔直觀的本地交互界面,包括一個 LCD(液晶顯示屏)屏幕和幾個功能按鍵。LCD 屏幕能夠實時顯示機器人的工作狀態、電量信息、清掃模式等關鍵信息,用戶可以通過功能按鍵方便地切換清掃模式、啟動或暫停清掃任務以及查詢清掃記錄等操作。
通過 Wi-Fi 模塊將機器人連接至家庭網絡,用戶可以使用手機 APP 遠程控制機器人。APP 界面友好,功能豐富,用戶可以隨時隨地啟動、暫停、預約清掃任務,切換清掃模式,查看清掃地圖和清潔效果數據等。
本基于輝芒微 32 位 MCU 的智能清潔機器人開發方案,充分發揮了 MCU 的高性能、低功耗優勢,通過精心設計的硬件架構和軟件算法,實現了自主導航、智能避障、高效清掃、自動充電以及便捷用戶交互等多項先進功能。以上就是深圳三佛科技分享的掃地機器人方案。深圳市三佛科技專注單片機應用方案設計與開發,提供8位單片機、32位單片機。